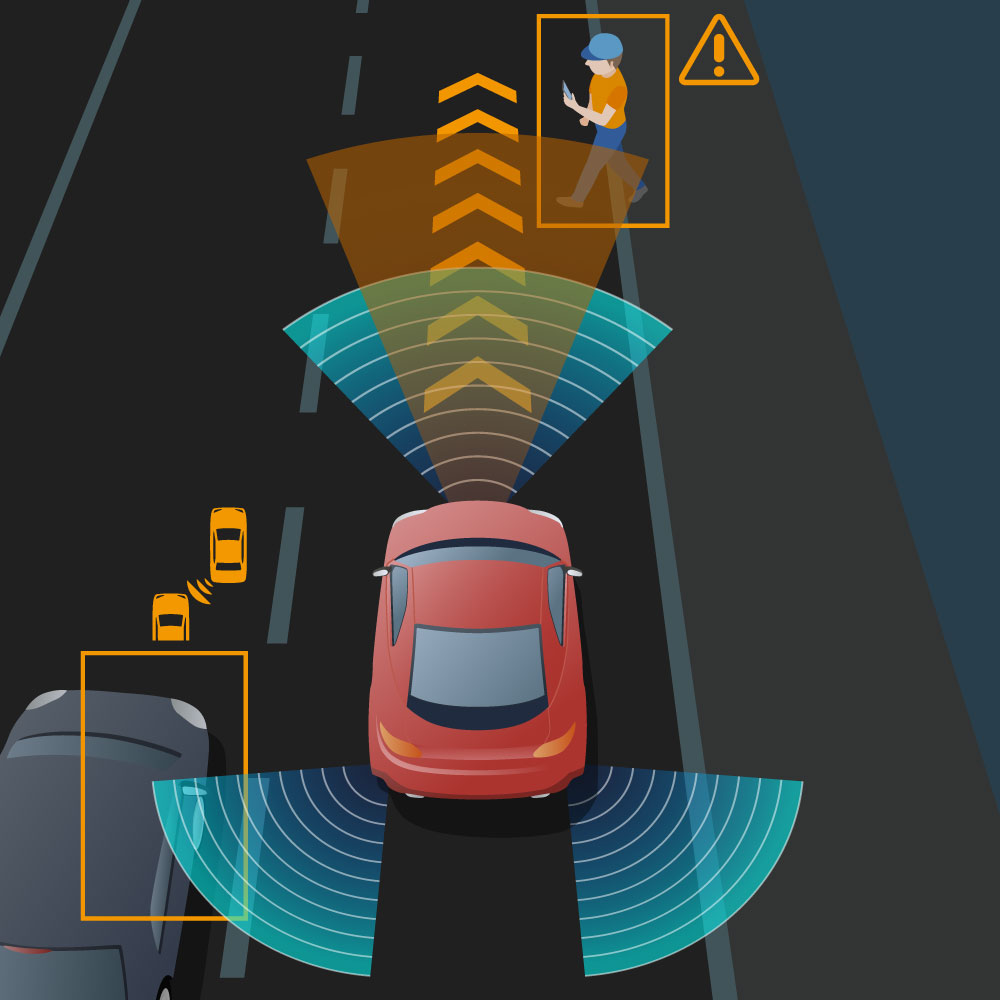
Advanced Driver-Assistance Systems
Behavior recognition and prediction
Using sensors fusion (vision, radar, etc.) to anticipate the maneuvers of cars, cyclists and pedestrians in the vicinity of a vehicle is a road safety issue. One of the difficulties of the problem is to take into account the data coming from different sensors, to integrate them with
data related to vehicle’s dynamics (constraints on acceleration and braking, radius of gyration etc. …) but also to take into account the driving rules. All these parameters are subject to uncertainty, and probabilistic reasoning is a tool of choice for inferring the behavior of other actors to make the most appropriate decisions.